# Clipped PPO
Each experiment uses 3 seeds and is trained for 10k environment steps.
The parameters used for Clipped PPO are the same parameters as described in the [original paper](https://arxiv.org/abs/1707.06347).
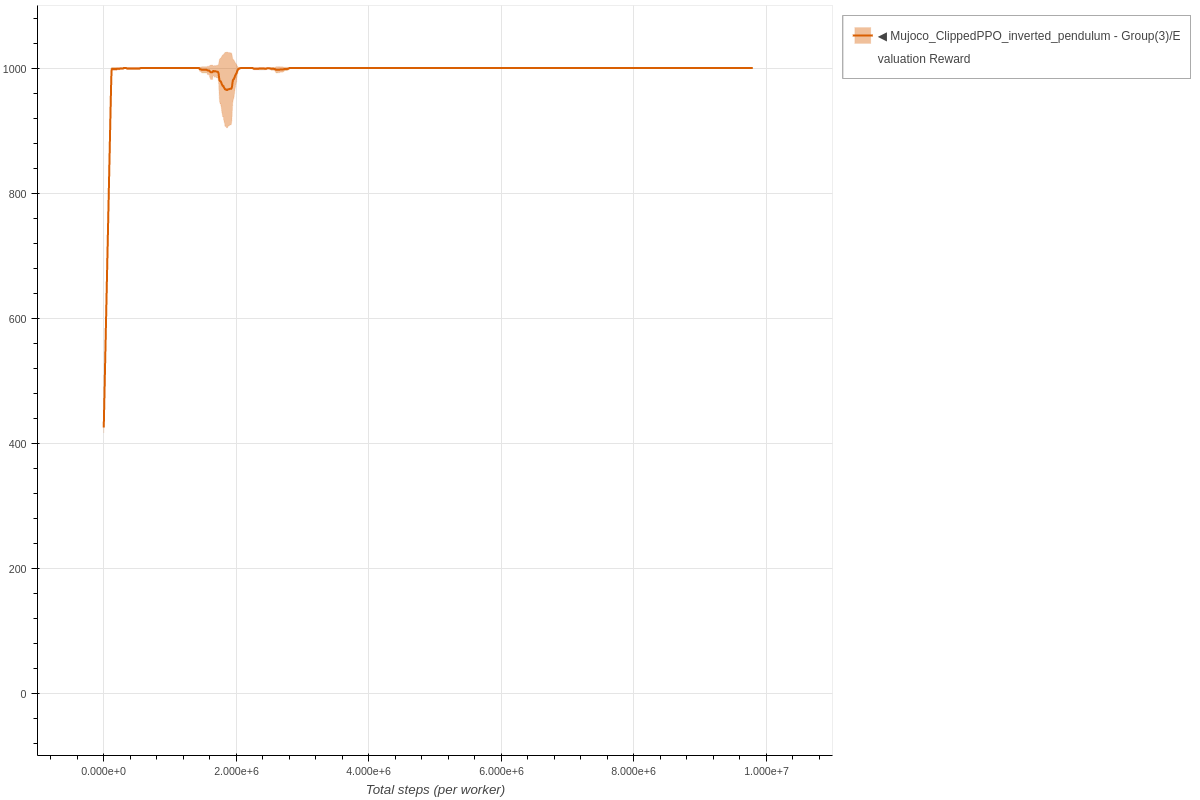
### Inverted Pendulum Clipped PPO - single worker
```bash
python3 coach.py -p Mujoco_ClippedPPO -lvl inverted_pendulum
```
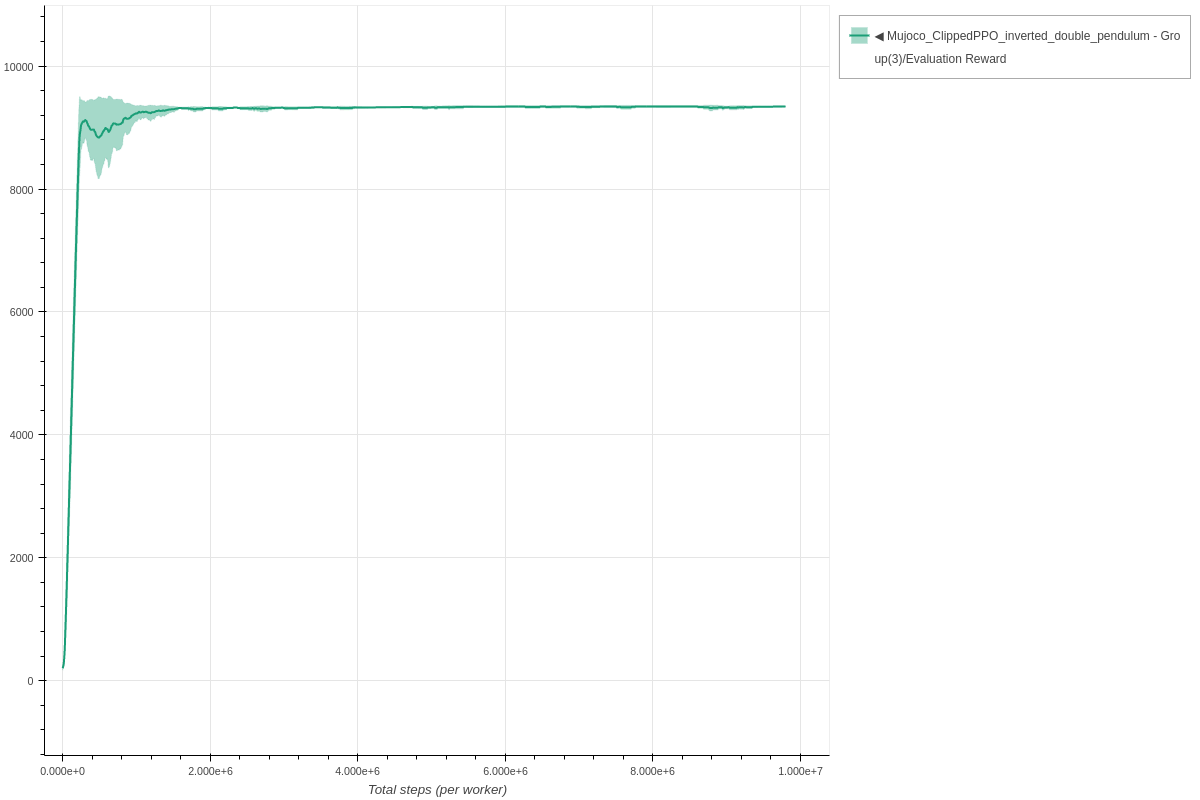
 ### Inverted Double Pendulum Clipped PPO - single worker
```bash
python3 coach.py -p Mujoco_ClippedPPO -lvl inverted_double_pendulum
```
### Inverted Double Pendulum Clipped PPO - single worker
```bash
python3 coach.py -p Mujoco_ClippedPPO -lvl inverted_double_pendulum
```
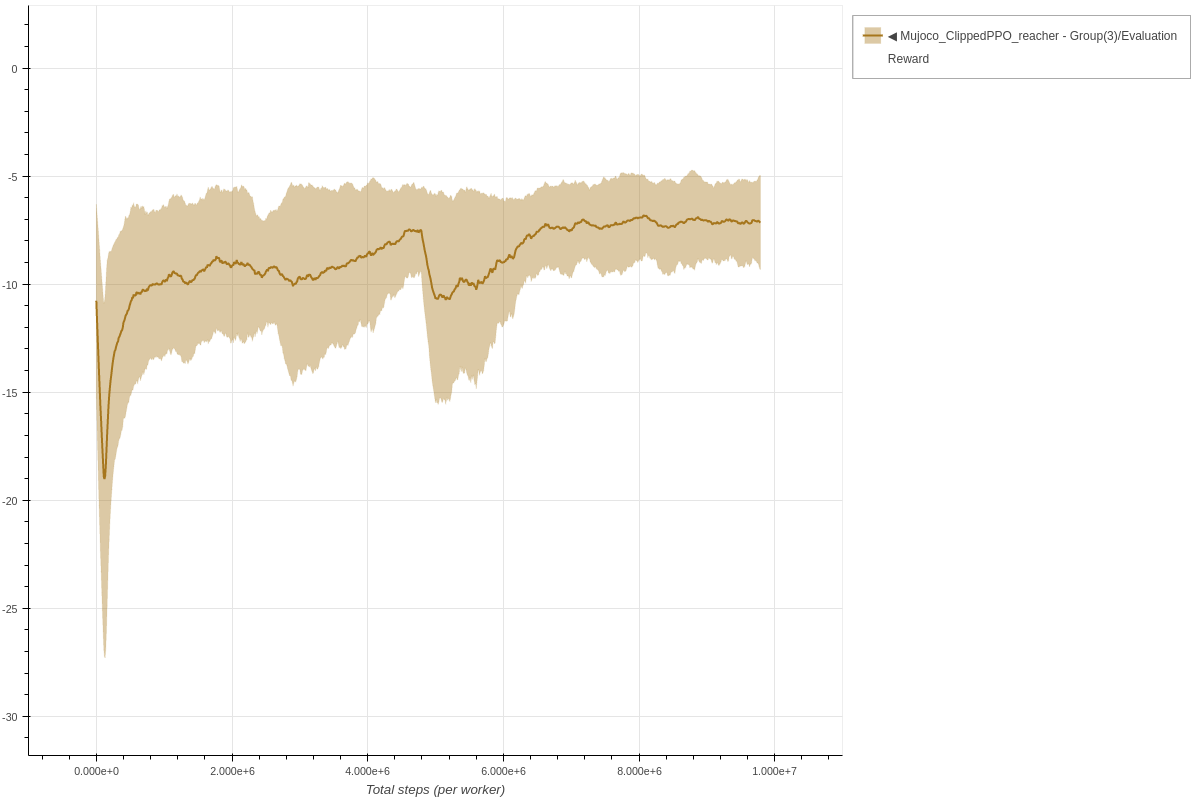
 ### Reacher Clipped PPO - single worker
```bash
python3 coach.py -p Mujoco_ClippedPPO -lvl reacher
```
### Reacher Clipped PPO - single worker
```bash
python3 coach.py -p Mujoco_ClippedPPO -lvl reacher
```
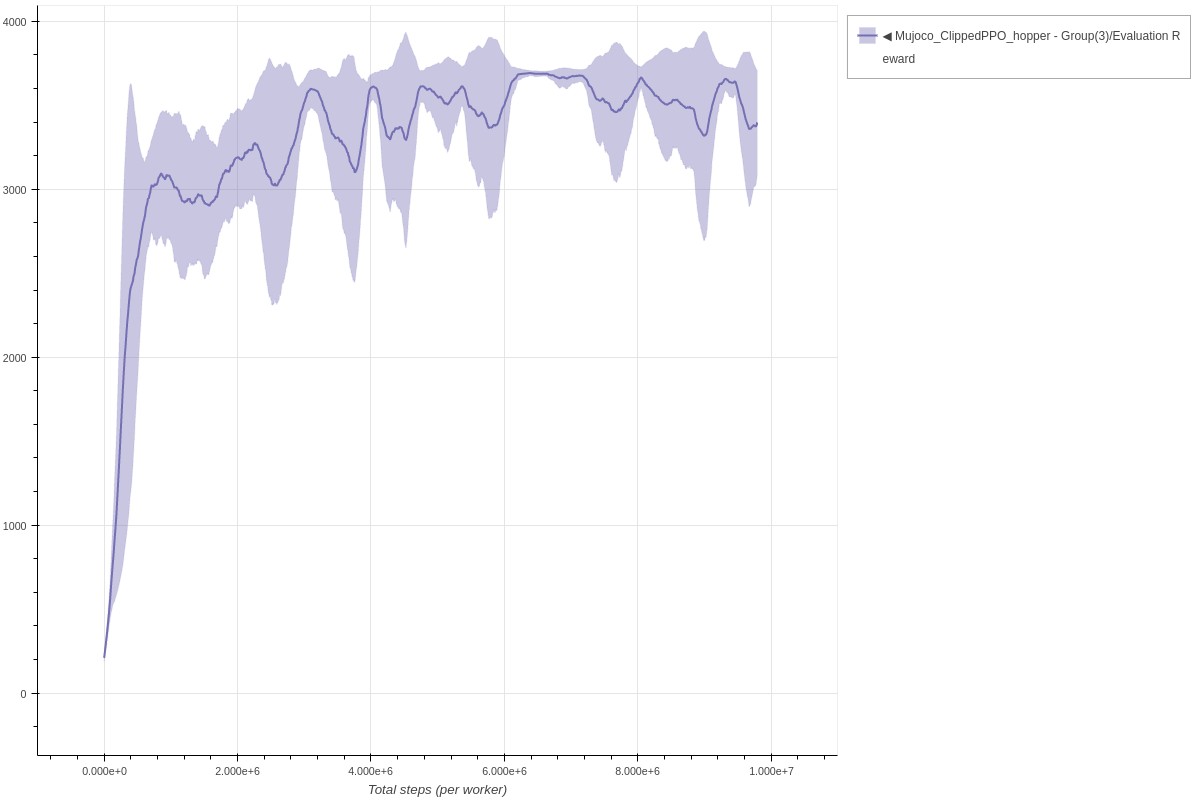
 ### Hopper Clipped PPO - single worker
```bash
python3 coach.py -p Mujoco_ClippedPPO -lvl hopper
```
### Hopper Clipped PPO - single worker
```bash
python3 coach.py -p Mujoco_ClippedPPO -lvl hopper
```
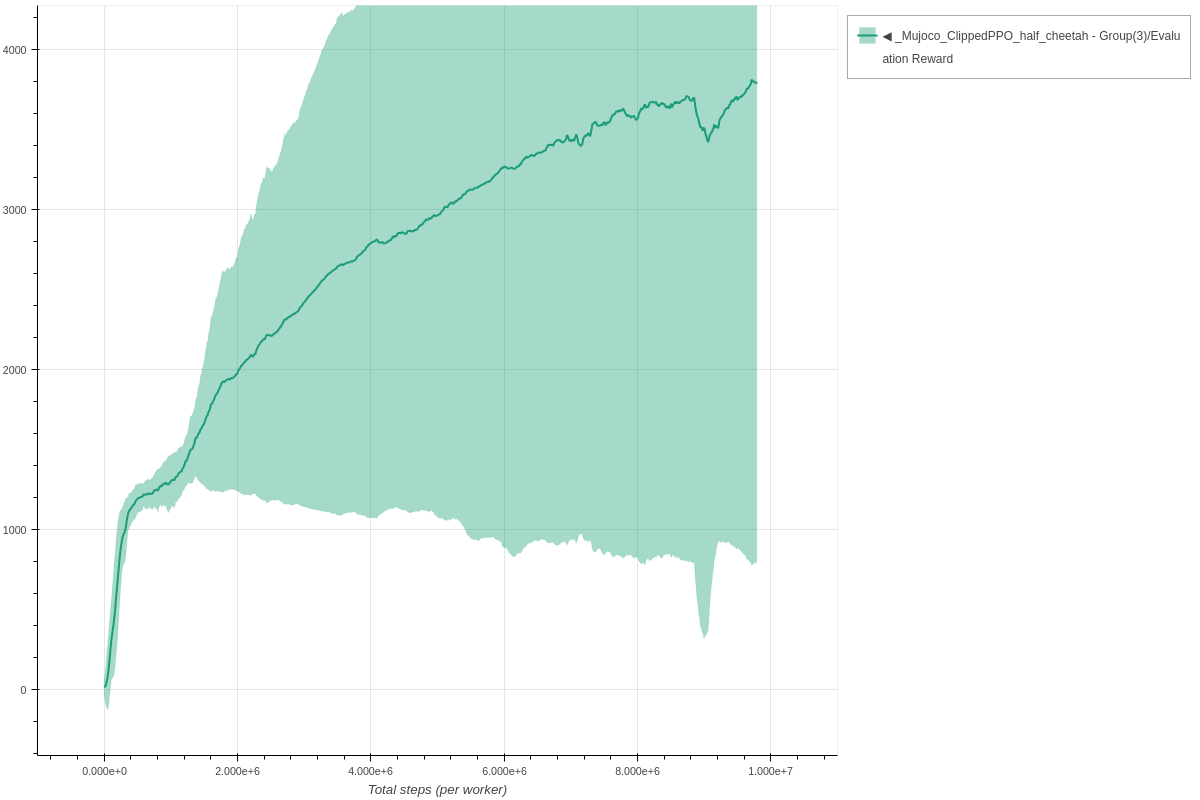
 ### Half Cheetah Clipped PPO - single worker
```bash
python3 coach.py -p Mujoco_ClippedPPO -lvl half_cheetah
```
### Half Cheetah Clipped PPO - single worker
```bash
python3 coach.py -p Mujoco_ClippedPPO -lvl half_cheetah
```
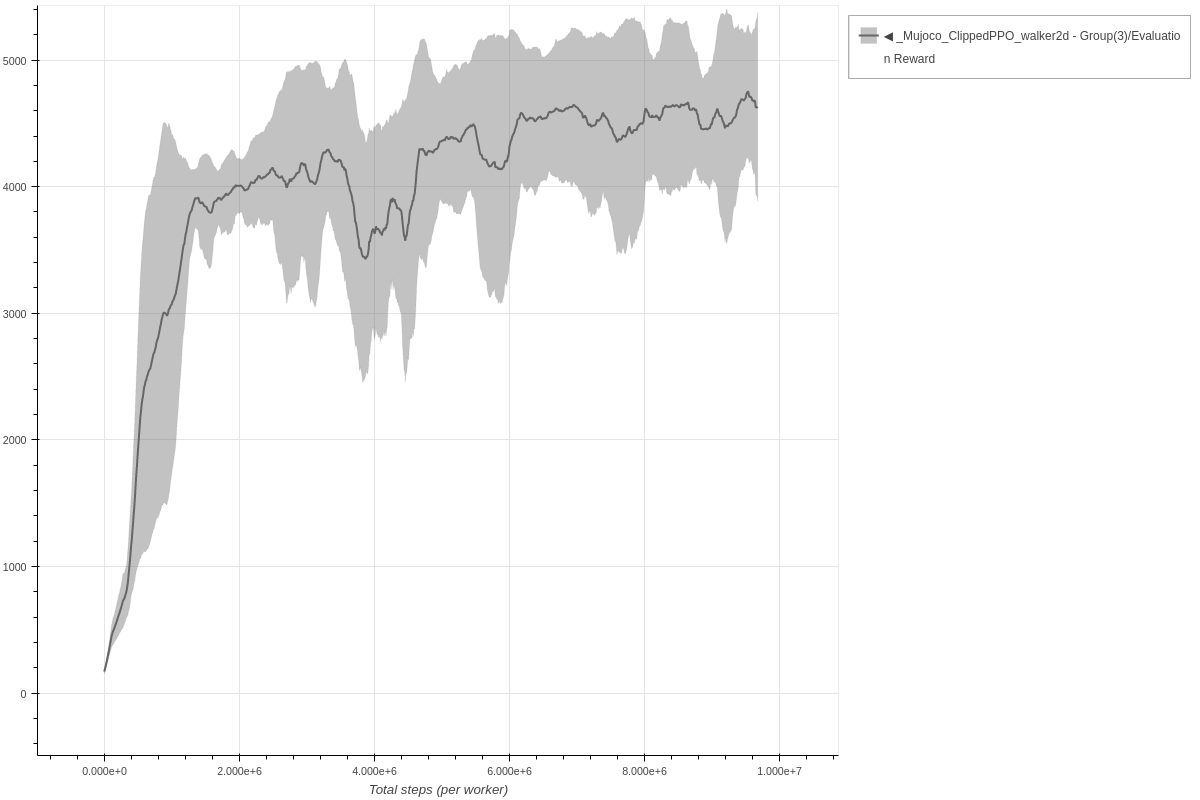
 ### Walker 2D Clipped PPO - single worker
```bash
python3 coach.py -p Mujoco_ClippedPPO -lvl walker2d
```
### Walker 2D Clipped PPO - single worker
```bash
python3 coach.py -p Mujoco_ClippedPPO -lvl walker2d
```
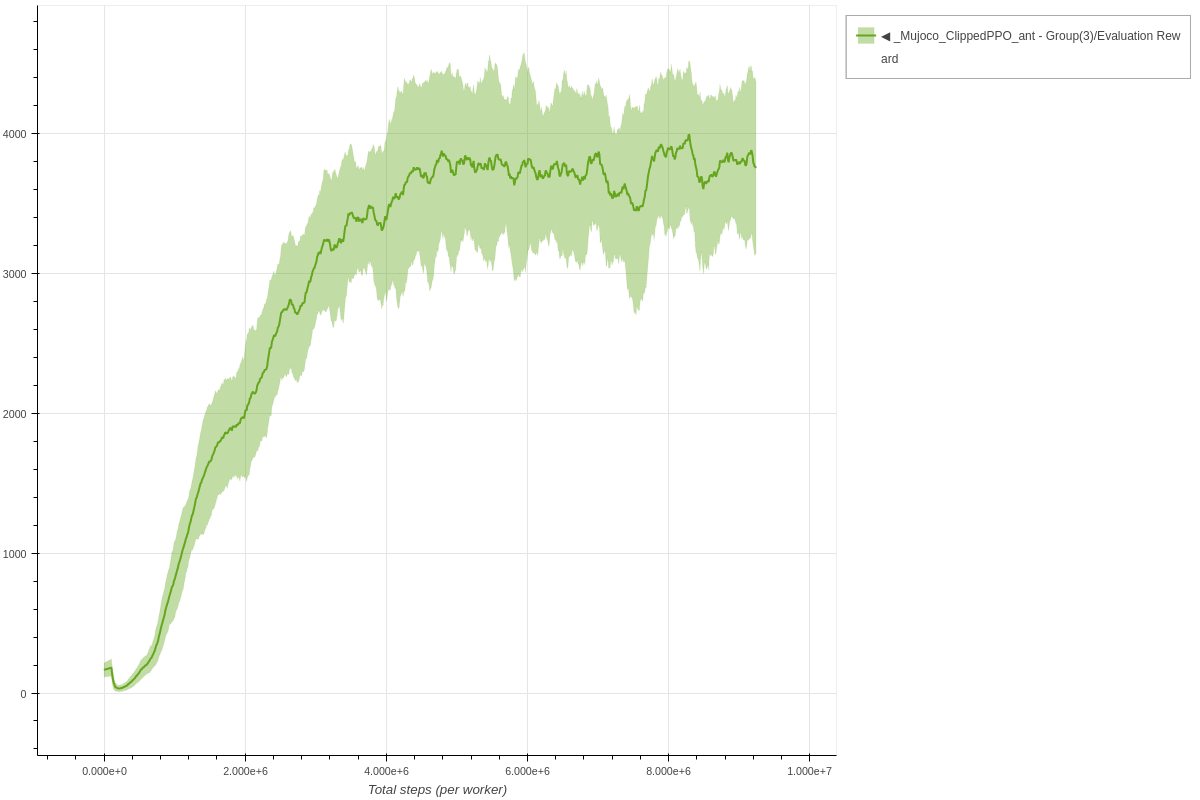
 ### Ant Clipped PPO - single worker
```bash
python3 coach.py -p Mujoco_ClippedPPO -lvl ant
```
### Ant Clipped PPO - single worker
```bash
python3 coach.py -p Mujoco_ClippedPPO -lvl ant
```
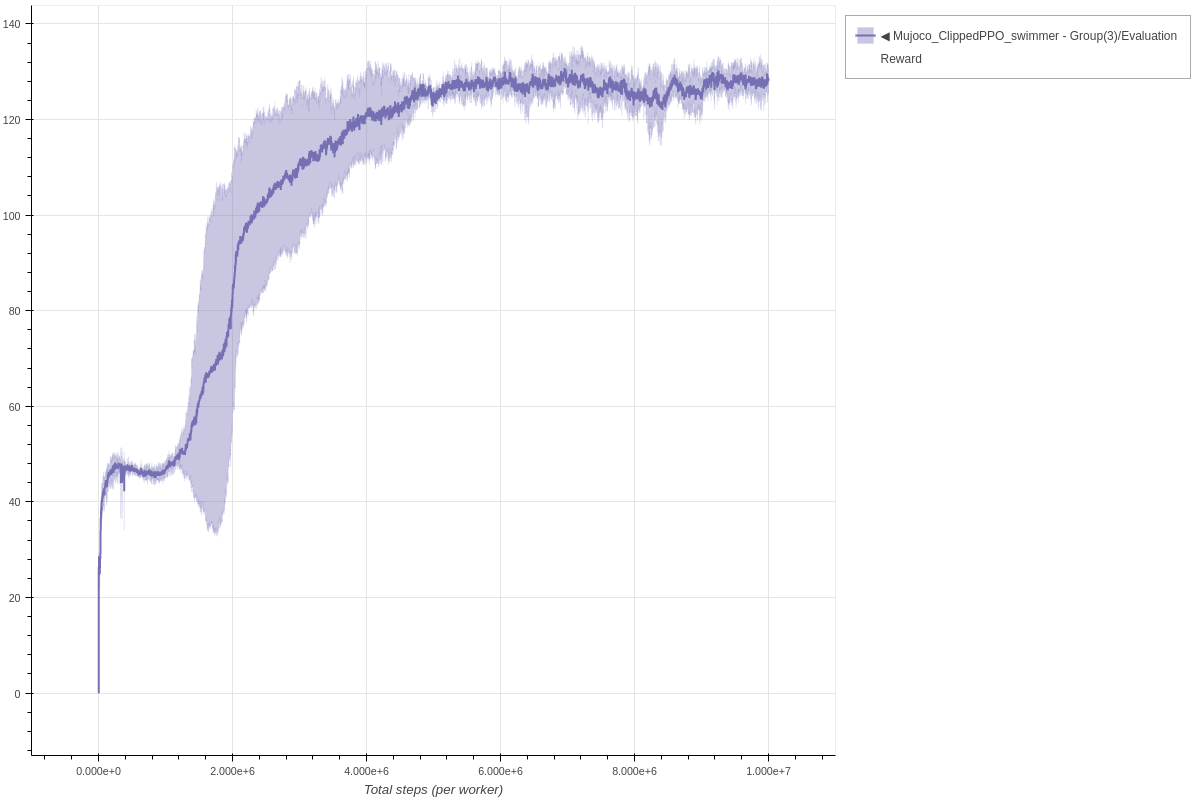
 ### Swimmer Clipped PPO - single worker
```bash
python3 coach.py -p Mujoco_ClippedPPO -lvl swimmer
```
### Swimmer Clipped PPO - single worker
```bash
python3 coach.py -p Mujoco_ClippedPPO -lvl swimmer
```
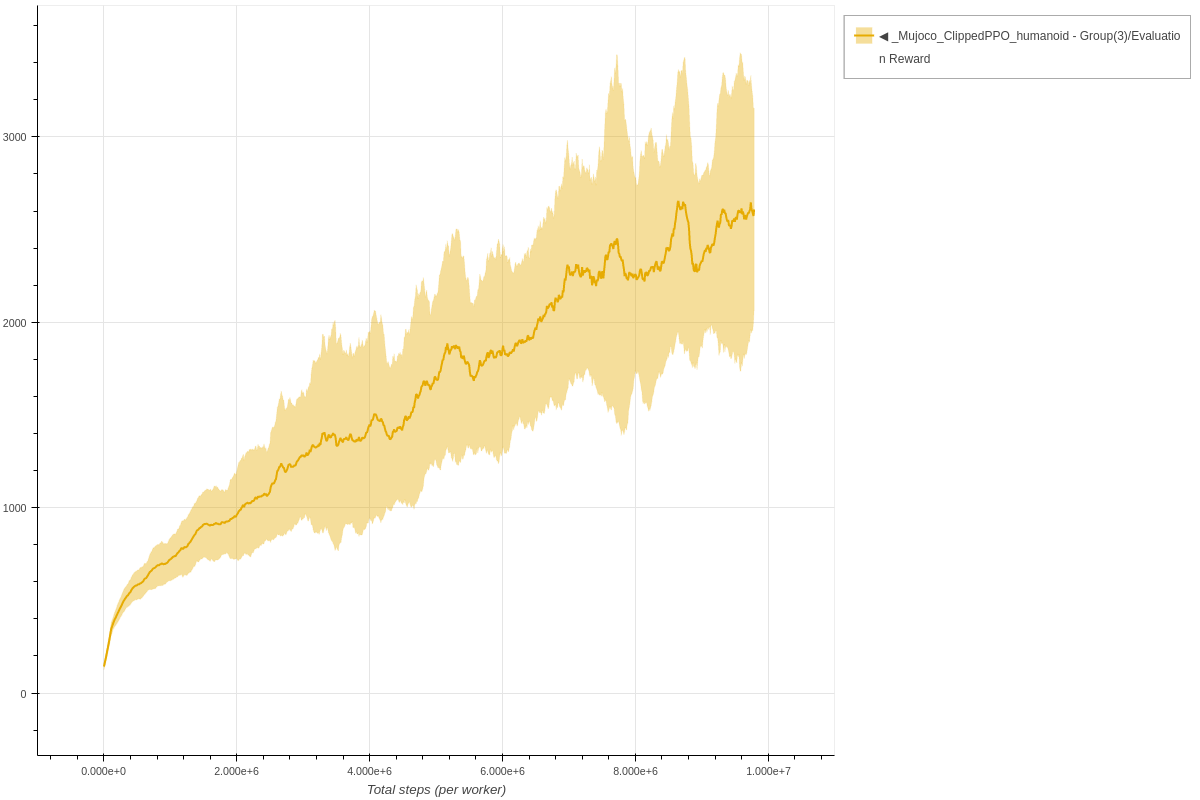
 ### Humanoid Clipped PPO - single worker
```bash
python3 coach.py -p Mujoco_ClippedPPO -lvl humanoid
```
### Humanoid Clipped PPO - single worker
```bash
python3 coach.py -p Mujoco_ClippedPPO -lvl humanoid
```