# Twin Delayed DDPG
Each experiment uses 5 seeds and is trained for 1M environment steps.
The parameters used for TD3 are the same parameters as described in the [original paper](https://arxiv.org/pdf/1802.09477.pdf), and [repository](https://github.com/sfujim/TD3).
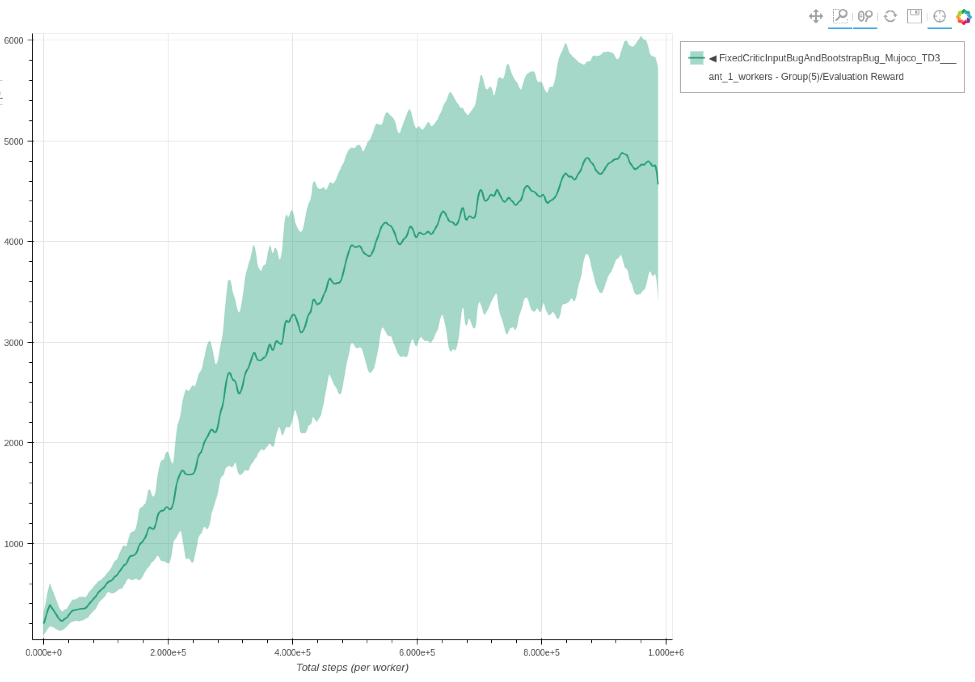
### Ant TD3 - single worker
```bash
coach -p Mujoco_TD3 -lvl ant
```
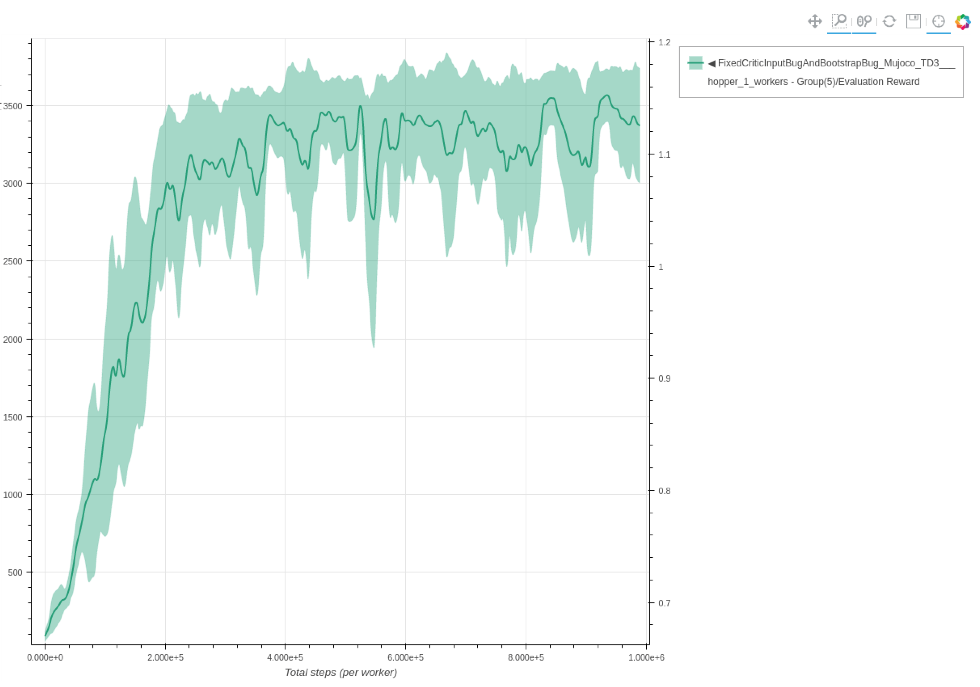
 ### Hopper TD3 - single worker
```bash
coach -p Mujoco_TD3 -lvl hopper
```
### Hopper TD3 - single worker
```bash
coach -p Mujoco_TD3 -lvl hopper
```
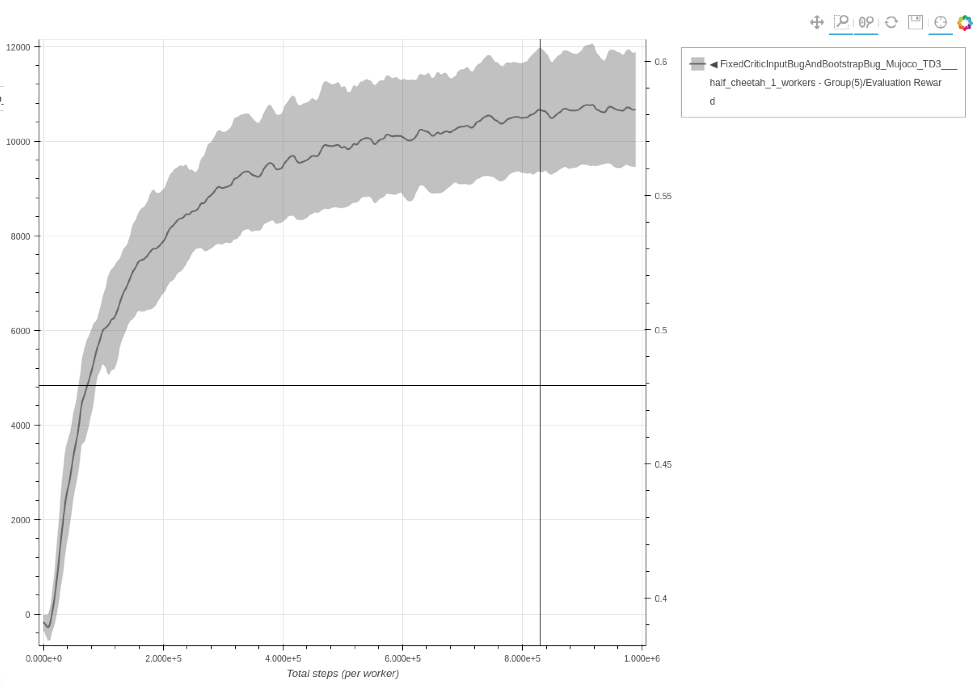
 ### Half Cheetah TD3 - single worker
```bash
coach -p Mujoco_TD3 -lvl half_cheetah
```
### Half Cheetah TD3 - single worker
```bash
coach -p Mujoco_TD3 -lvl half_cheetah
```
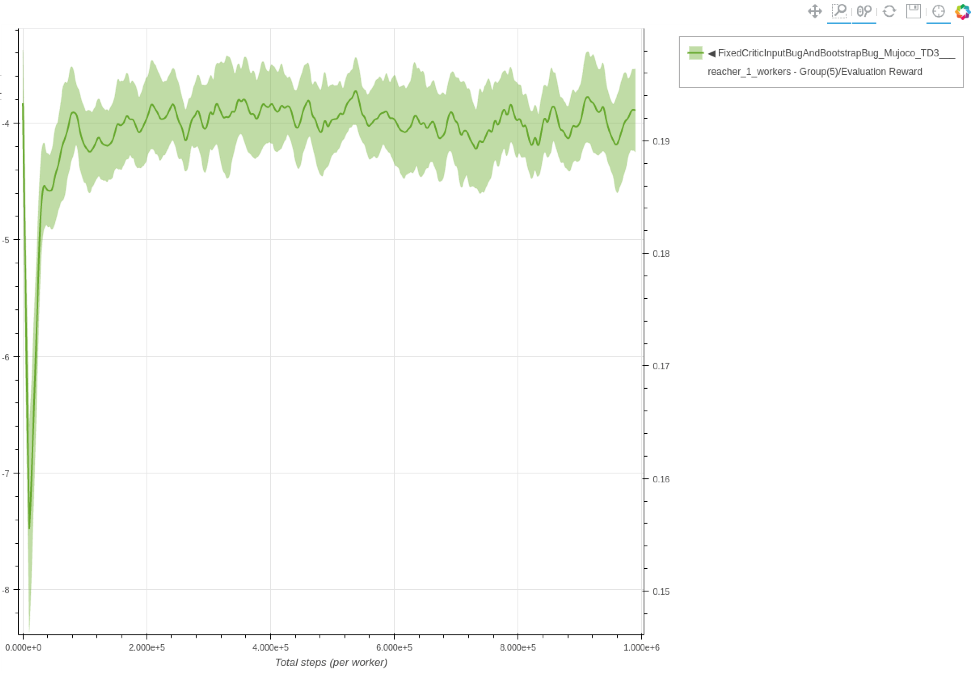
 ### Reacher TD3 - single worker
```bash
coach -p Mujoco_TD3 -lvl reacher
```
### Reacher TD3 - single worker
```bash
coach -p Mujoco_TD3 -lvl reacher
```
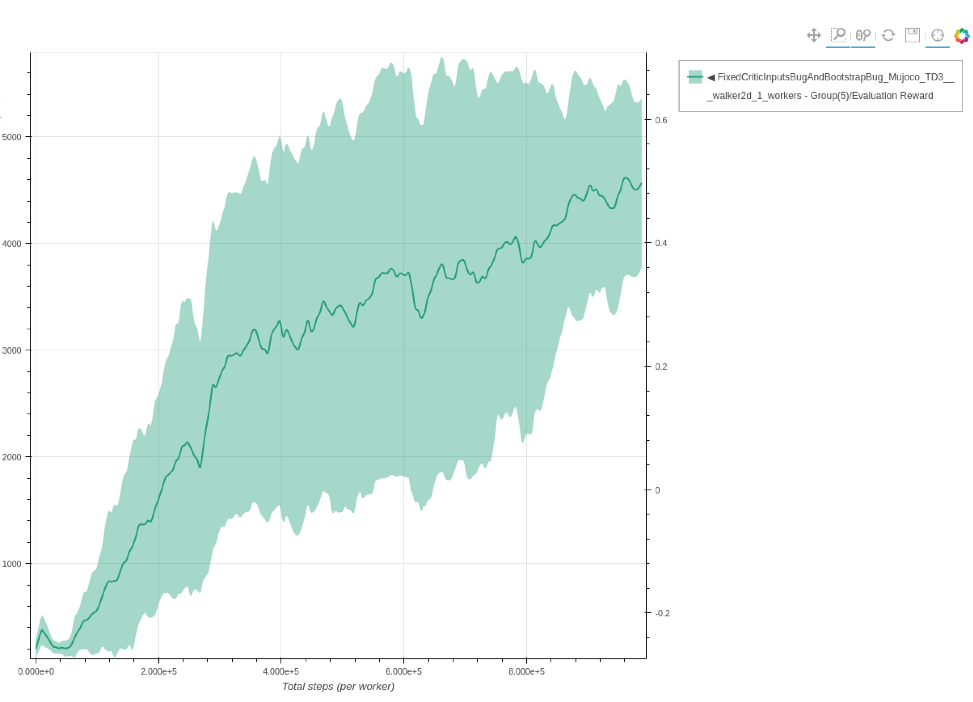
 ### Walker2D TD3 - single worker
```bash
coach -p Mujoco_TD3 -lvl walker2d
```
### Walker2D TD3 - single worker
```bash
coach -p Mujoco_TD3 -lvl walker2d
```