# Coach Benchmarks
The following figures are training curves of some of the presets available through Coach.
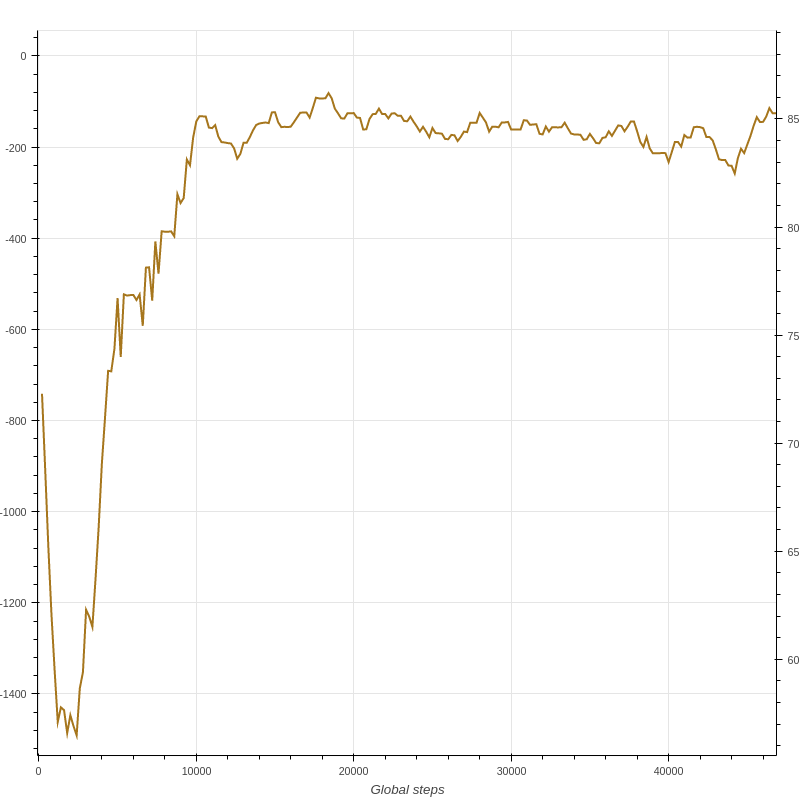
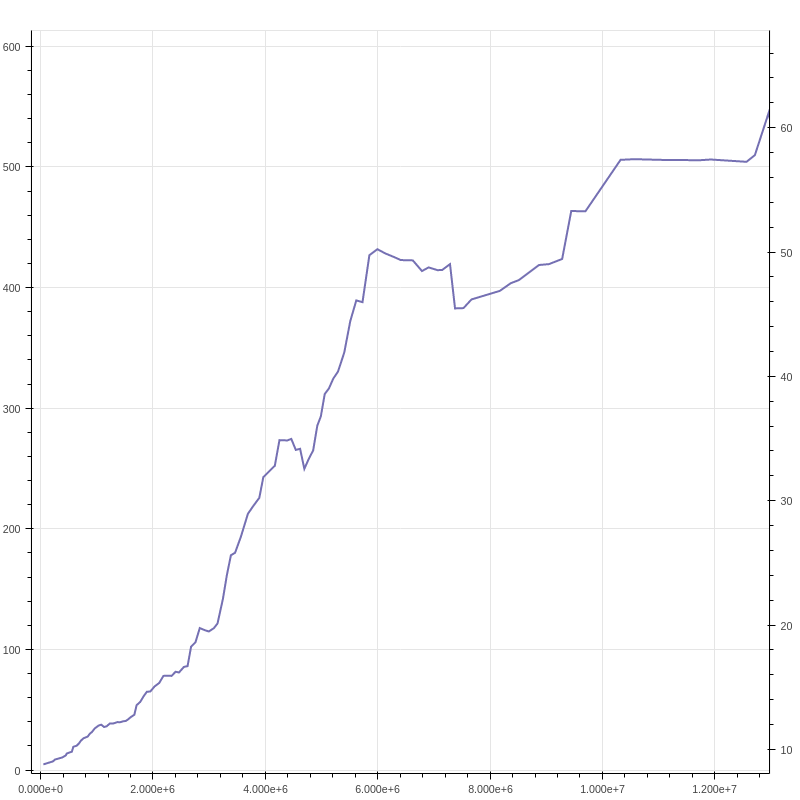
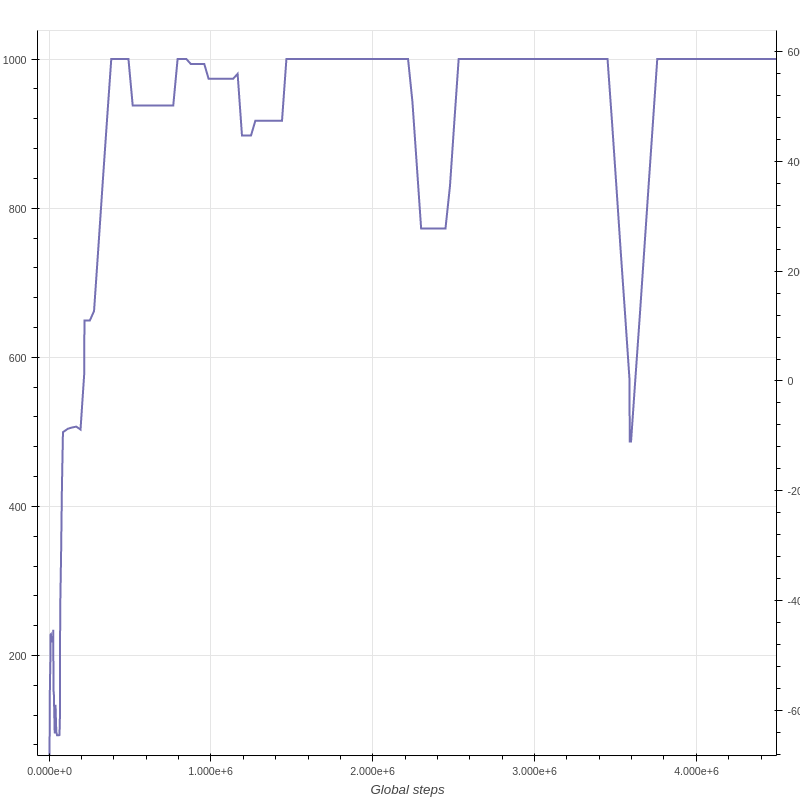
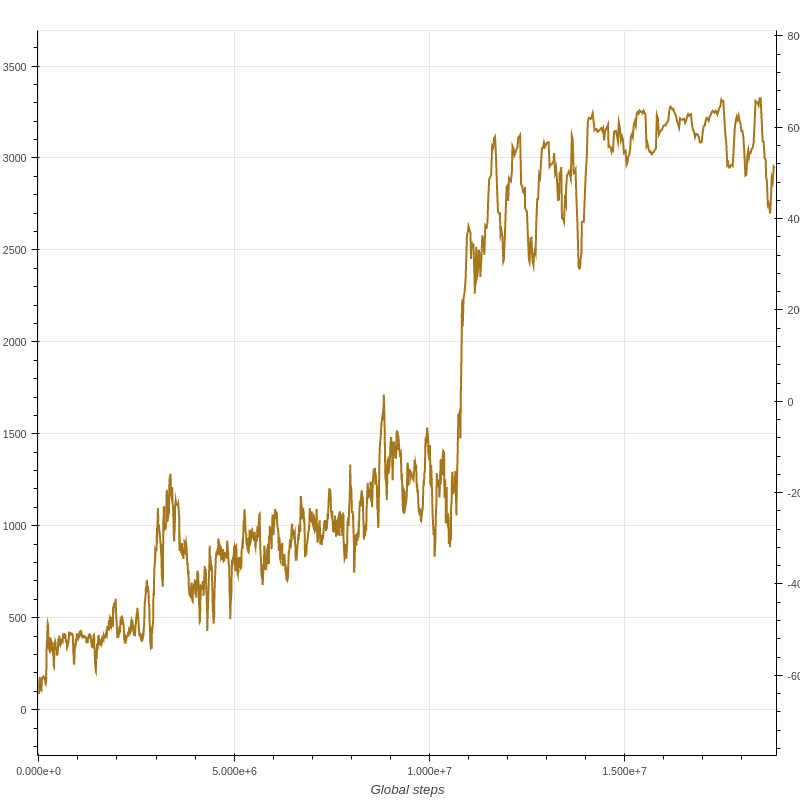
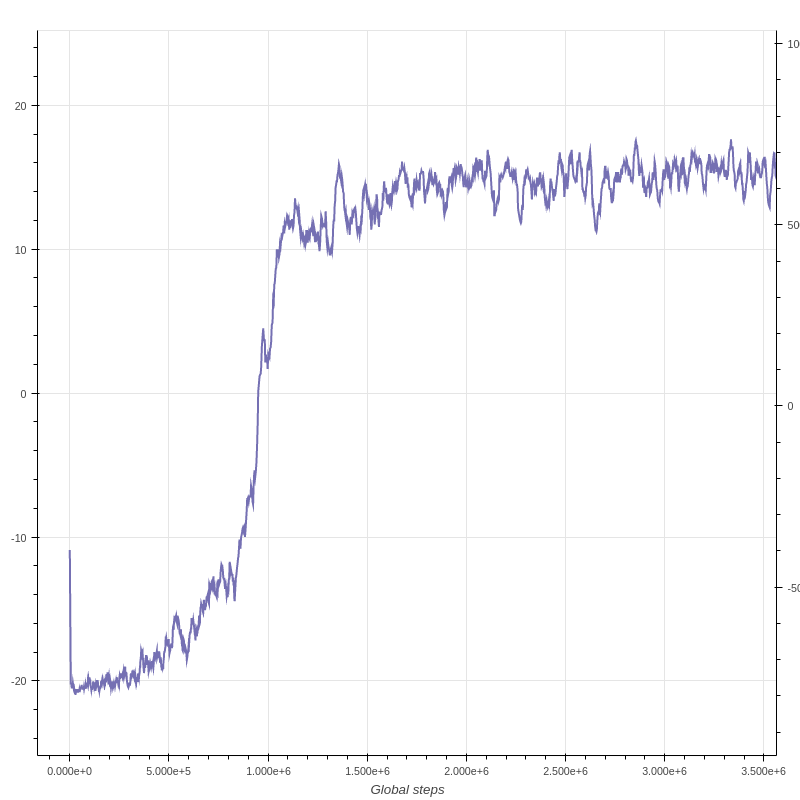
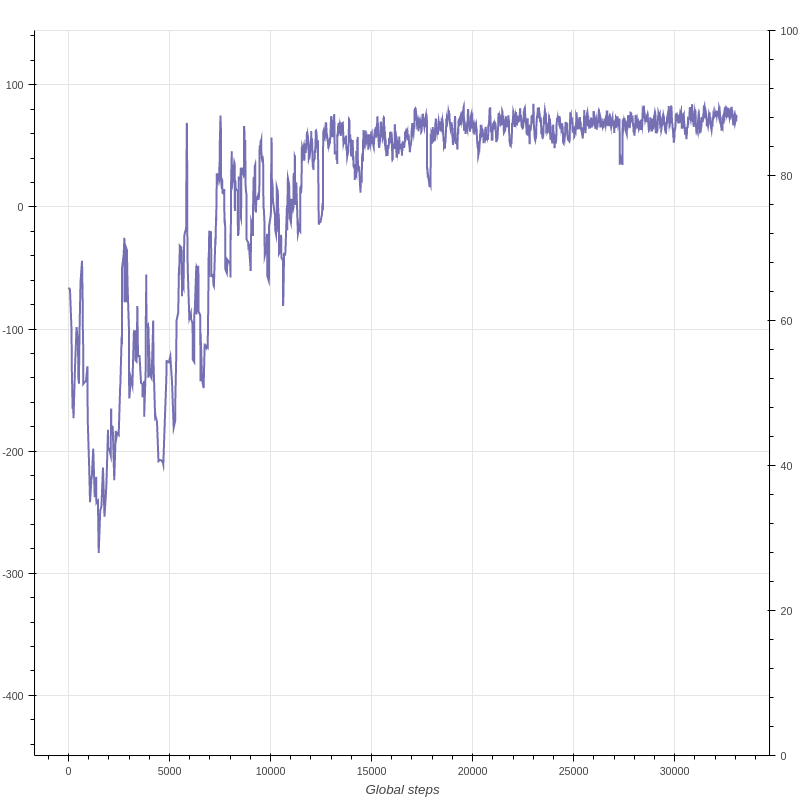
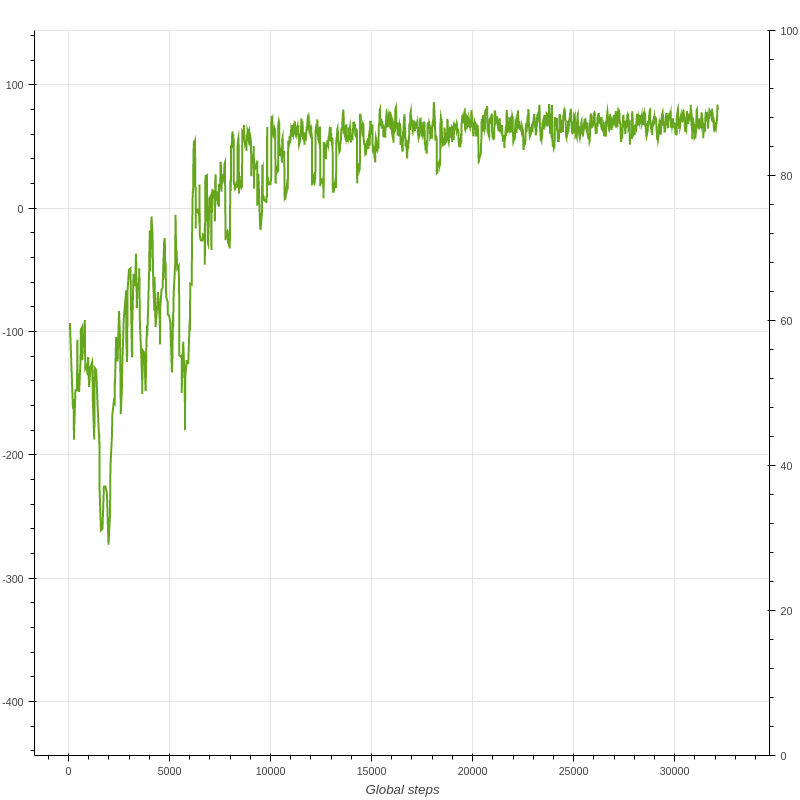
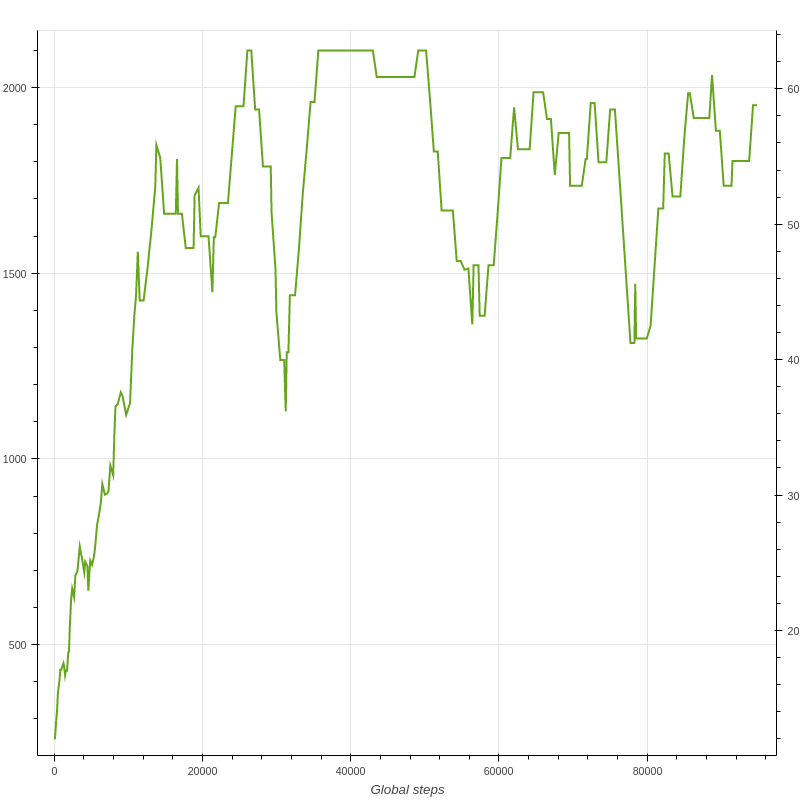
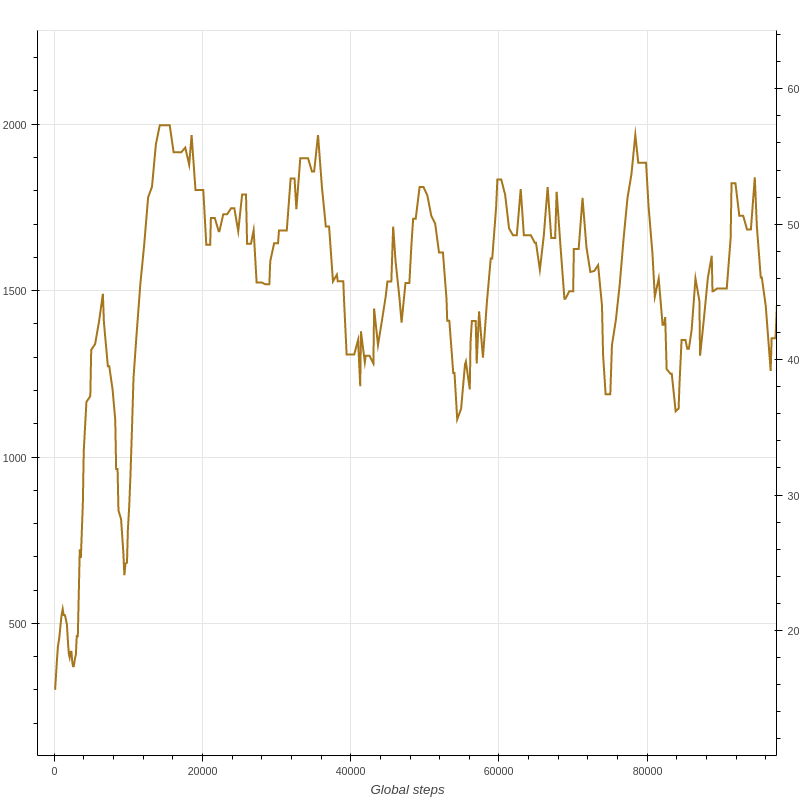
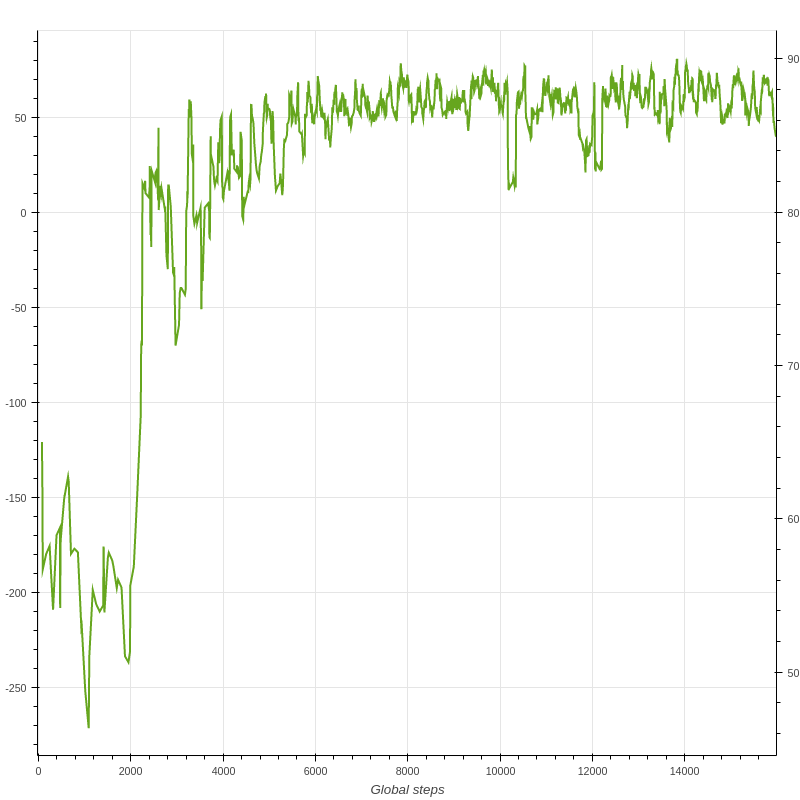
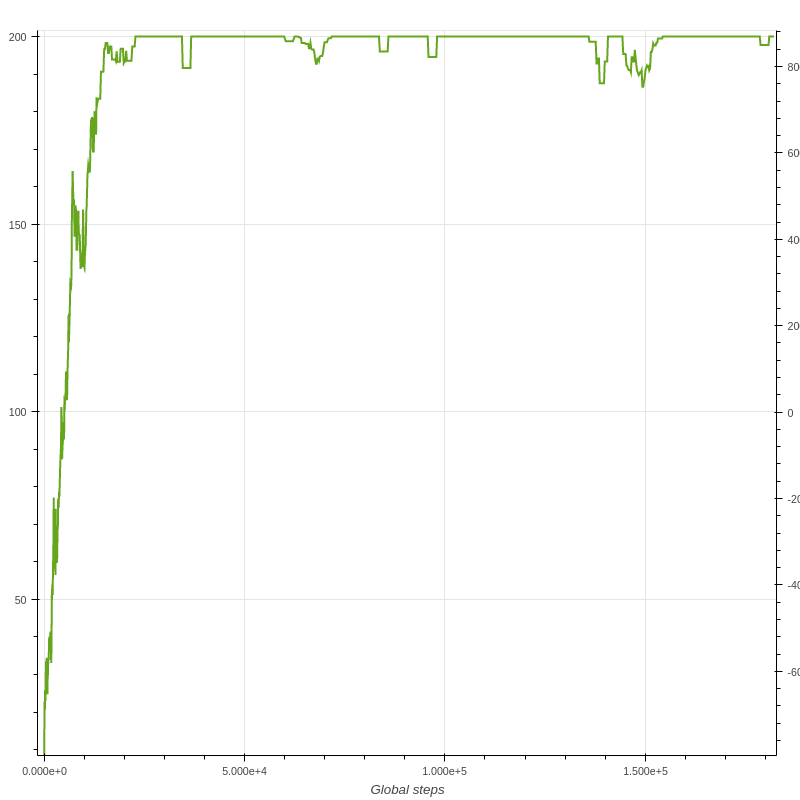
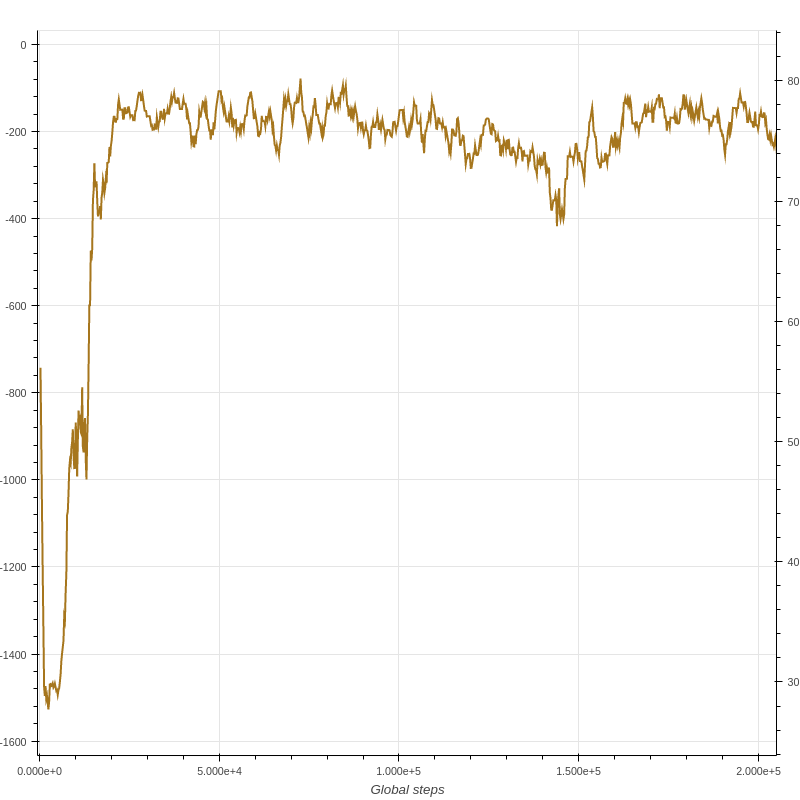
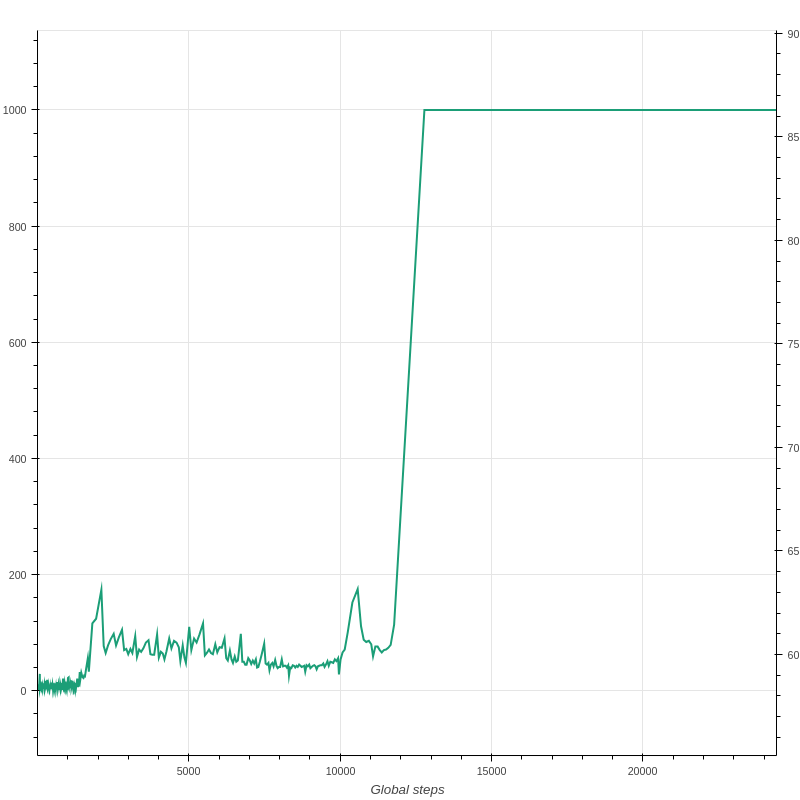
The X axis in all the figures is the total steps (for multi-threaded runs, this is the accumulated number of steps over all the workers).
The Y axis in all the figures is the average episode reward with an averaging window of 11 episodes.
These are the results you can expect to get when running the pre-defined presets in Coach.
## A3C
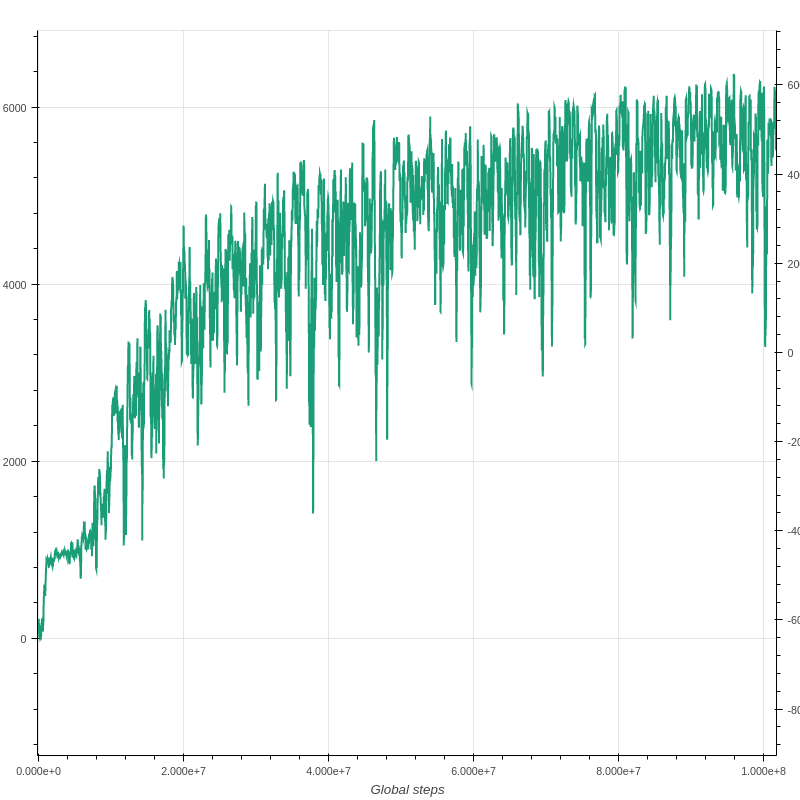
### Breakout_A3C with 16 workers
```bash
python3 coach.py -p Breakout_A3C -n 16 -r
```
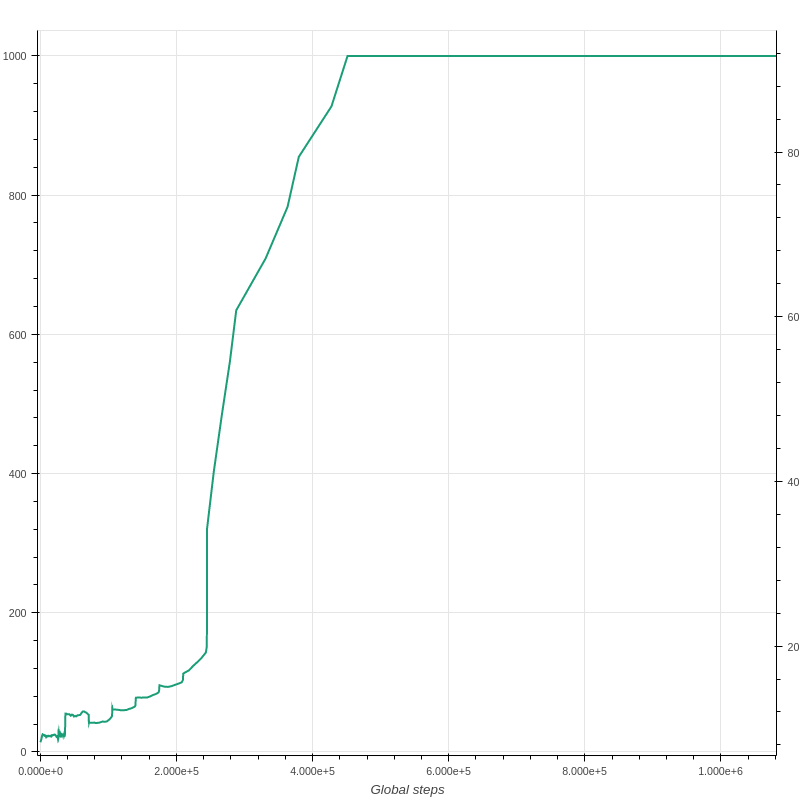
 ### InvertedPendulum_A3C with 16 workers
```bash
python3 coach.py -p InvertedPendulum_A3C -n 16 -r
```
### InvertedPendulum_A3C with 16 workers
```bash
python3 coach.py -p InvertedPendulum_A3C -n 16 -r
```
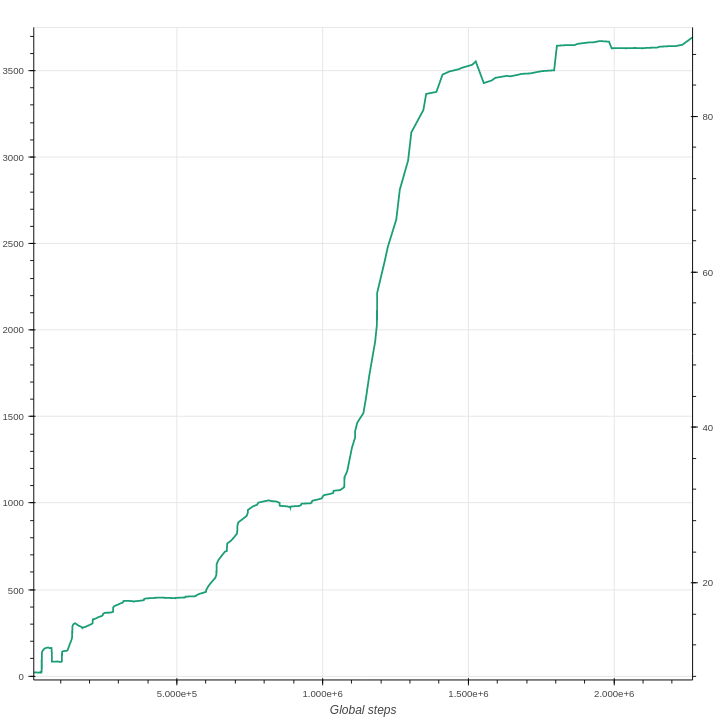
 ### Hopper_A3C with 16 workers
```bash
python3 coach.py -p Hopper_A3C -n 16 -r
```
### Hopper_A3C with 16 workers
```bash
python3 coach.py -p Hopper_A3C -n 16 -r
```
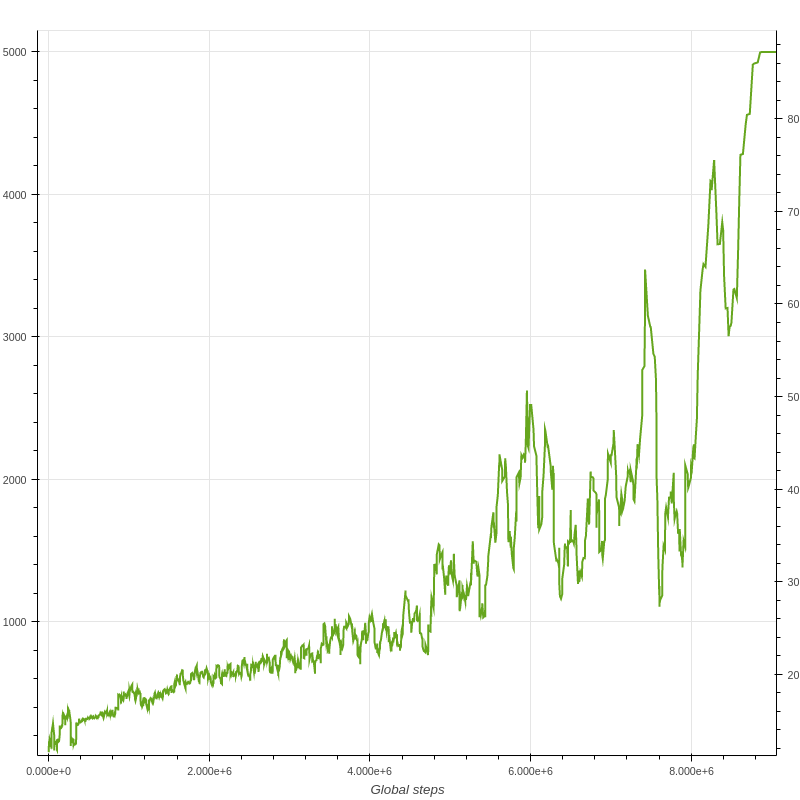
 ### Ant_A3C with 16 workers
```bash
python3 coach.py -p Ant_A3C -n 16 -r
```
### Ant_A3C with 16 workers
```bash
python3 coach.py -p Ant_A3C -n 16 -r
```
 ## Clipped PPO
### InvertedPendulum_ClippedPPO with 16 workers
```bash
python3 coach.py -p InvertedPendulum_ClippedPPO -n 16 -r
```
## Clipped PPO
### InvertedPendulum_ClippedPPO with 16 workers
```bash
python3 coach.py -p InvertedPendulum_ClippedPPO -n 16 -r
```
 ### Hopper_ClippedPPO with 16 workers
```bash
python3 coach.py -p Hopper_ClippedPPO -n 16 -r
```
### Hopper_ClippedPPO with 16 workers
```bash
python3 coach.py -p Hopper_ClippedPPO -n 16 -r
```
 ### Humanoid_ClippedPPO with 16 workers
```bash
python3 coach.py -p Humanoid_ClippedPPO -n 16 -r
```
### Humanoid_ClippedPPO with 16 workers
```bash
python3 coach.py -p Humanoid_ClippedPPO -n 16 -r
```
 ## DQN
### Pong_DQN
```bash
python3 coach.py -p Pong_DQN -r
```
## DQN
### Pong_DQN
```bash
python3 coach.py -p Pong_DQN -r
```
 ### Doom_Basic_DQN
```bash
python3 coach.py -p Doom_Basic_DQN -r
```
### Doom_Basic_DQN
```bash
python3 coach.py -p Doom_Basic_DQN -r
```
 ## Dueling DDQN
### Doom_Basic_Dueling_DDQN
```bash
python3 coach.py -p Doom_Basic_Dueling_DDQN -r
```
## Dueling DDQN
### Doom_Basic_Dueling_DDQN
```bash
python3 coach.py -p Doom_Basic_Dueling_DDQN -r
```
 ## DFP
### Doom_Health_DFP
```bash
python3 coach.py -p Doom_Health_DFP -r
```
## DFP
### Doom_Health_DFP
```bash
python3 coach.py -p Doom_Health_DFP -r
```
 ## MMC
### Doom_Health_MMC
```bash
python3 coach.py -p Doom_Health_MMC -r
```
## MMC
### Doom_Health_MMC
```bash
python3 coach.py -p Doom_Health_MMC -r
```
 ## NEC
## Doom_Basic_NEC
```bash
python3 coach.py -p Doom_Basic_NEC -r
```
## NEC
## Doom_Basic_NEC
```bash
python3 coach.py -p Doom_Basic_NEC -r
```
 ## PG
### CartPole_PG
```bash
python3 coach.py -p CartPole_PG -r
```
## PG
### CartPole_PG
```bash
python3 coach.py -p CartPole_PG -r
```
 ## DDPG
### Pendulum_DDPG
```bash
python3 coach.py -p Pendulum_DDPG -r
```
## DDPG
### Pendulum_DDPG
```bash
python3 coach.py -p Pendulum_DDPG -r
```
 ## NAF
### InvertedPendulum_NAF
```bash
python3 coach.py -p InvertedPendulum_NAF -r
```
## NAF
### InvertedPendulum_NAF
```bash
python3 coach.py -p InvertedPendulum_NAF -r
```
 ### Pendulum_NAF
```bash
python3 coach.py -p Pendulum_NAF -r
```
### Pendulum_NAF
```bash
python3 coach.py -p Pendulum_NAF -r
```